Robots Meet Claude: Making Robots OpenClaw-ready with peaq Robotics SDK



Heads up: this one’s for the builders. If certain terms are unclear to you, check out peaq’s documentation, here
With the first peaq Robotics SDK Claw skill (Link to the Skill), robots can now connect to OpenClaw agents and also receive and deploy the peaq Robotics SDK directly via those agents, laying the foundation for any onboarded robot to become an onchain financial asset.
The peaq Robotics SDK is part of peaq’s SDK series for onboarding all kinds of machine types into the Machine Economy. It’s fully ROS2 compatible and runs directly on robots as a lightweight node. It enables you to bring robots onchain and equip them with peaq’s Universal Machine Functions — such as identity — laying the foundation for robots to become full economic agents.
The SDK packages peaq’s runtime native Universal Machine Functions and gets constant upgrades as new functions and features are added to peaq’s runtime.
With the peaq Robotics SDK integrated as a Claw skill in the OpenClaw agent stack, robots become OpenClaw-ready by default and OpenClaw agents become robot-native by default.
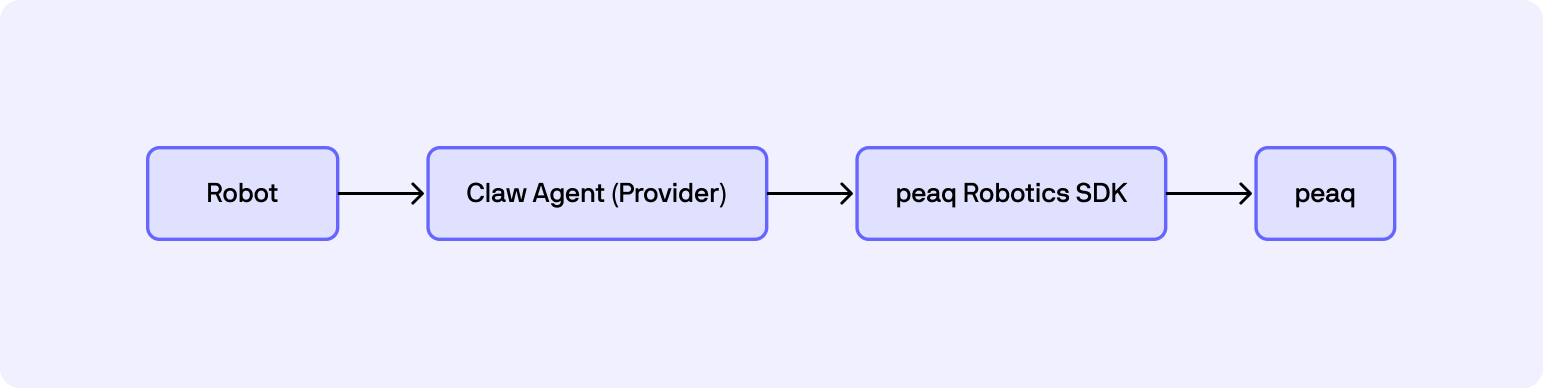
OpenClaw agents deliver the peaq Robotics SDK directly to robots, provisioning a lightweight peaq node that generates and anchors a DID on-chain. During provisioning, a lightweight peaq node is deployed on the robot, which generates a peaq ID and anchors its DID document onchain. Robots can then connect to agents, receive and execute reusable skills, and operate autonomously across digital and physical environments.
Under the hood, the SDK provides decentralized machine identity, access control, fleet management, machine tokenization, machine-to-agent and machine-to-machine payments, and onchain coordination primitives—enabling robots to function as autonomous onchain actors.
OpenClaw agents expose reusable skills that robots can consume, while robots can either run their own dedicated agent or interact with existing shared agents, enabling one-to-many and many-to-many agent–machine workflows.
Fully Autonomous Robots as Onchain Actors
With the peaq Robotics SDK and OpenClaw agent actions, robots can sign autonomously and act as independent onchain entities.
Robots can:
- Dynamically adopt new skills via agents
- Hold and manage funds
- Perform financial and service actions without human intervention
A humanoid robot could now theoretically run its own social media account, shop on behalf of its owner via purch.xyz, access financial services through bankr.bot, and operate publicly with its own identity and budget (e.g. on Moltbook).
Developers can build scalable machine applications where robots and agents are fully interoperable — from orchestration and automation to autonomous accounts and services.
What this unlocks
OpenClaw-ready robots
Any robot can immediately interact with OpenClaw agents using shared skills and workflows.
Reusable agent skills for machines
Skills created once can be reused across robots, fleets, and deployments.
Robot-specific agents and shared agents
Robots can run their own agents or be served by shared agents, enabling flexible orchestration models.
New machine applications
From autonomous coordination and fleet management to outward-facing social, service, and financial agents.
How to Get Your Robot Claude-Ready and On-Chain in a few minutes
Deploy the Claude/Claw Agent Stack
Set up a Claude/Claw agent environment leveraging ex. Akash as the execution layer.
Agent Deploys peaq Robotics SDK
Integrate the peaq Robotics SDK into your robot or machine runtime to enable identity and agent interaction.
Initialize the Robot
Bootstrap the runtime and assign the robot a peaq ID so it can securely interact with agents.
Connect to Agents
Pair the robot with existing Claude/Claw agents or spin up a dedicated agent to provide skills.
Execute and Share Skills
Run agent-provided skills on the robot or expose robot capabilities back to agents for reuse.
FAQ